

Ce sunt sistemele de timp real?
Sistemele de timp real sunt sisteme embedded care controleaza mediul extern in timp real (sisteme reactive).
Exemple de aplicabilitati ale sistemelor de timp real:
- Vehicule (automobil, avion, etc.)
- Controlul traficului (autostrada, aerian, cai ferate, etc.)
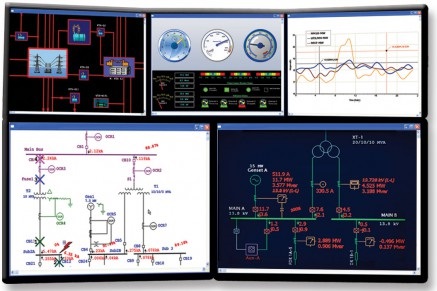
- Controlul proceselor (uzina electrica, chimica, etc.)
- Sisteme medicale (terapia prin iradiere, etc.)
- Telefonie, radio, comunicatii prin satelit
- Jocuri de calculator
Printre caracteristicile sistemelor de timp real, enumeram:
- Constrangeri de timp/termen limita (corectitudine temporala si functionala);
- Hard deadline (trebuie sa respecte termenul intotdeauna; controller pentru traficul aerian);
- Soft deadline (trebuie sa respecte termenul frecvent; decoder MPEG);
- Concurenta (procese multiple; face fata la semnale multiple de intrare si iesire);
- Fiabilitate (cat de des se defecteaza sistemul);
- Toleranta la defecte (recunoasterea si tratarea erorilor si defectelor);
- Sisteme Critice (cost mare al unui defect).
Structura cursului
- Definitie: Sisteme de timp real
- Caracteristici
- Program de timp real pe un procesor
- Sisteme de operare
- Serviciile unui SO
- SO – ierarhie
- Taskuri si functii
- RTOS
- Implementarea in Real-Time OS
- Organizarea unui kernel monolitic
- Organizarea unui microkernel
- RTOS – Kernel
- Polled Loop System
- Program cu o singura bucla de control
- Polled Loops
- Sisteme bazate pe intreruperi
- Tratarea Intreruperilor
- Interrupt Service Routine
- Implementarea unei rutine eventdriven
- Implementarea operatiilor periodice simple
- Timer Software
- Sisteme Foreground/Background
- Abordarea Multi-Tasking
- Multitasking
- Caracteristicile unui task
- Exemplu Multitasking
- Sisteme cu executie ciclica
- Sisteme Round-Robin
- Planificarea statica
- Planificarea (scheduling)
- Evaluarea performantelor algoritmilor de planificare
- Planificarea bazata pe prioritati
- Algoritmi de planificare pe prioritati
- Planificarea constransa de toleranta la defecte
- Planificarea cu realocarea resurselor
- Procesarea cu o anumita precizie
- Priority Inversion/Inheritance
- RTOS Full-Feature
- Cateva exemple de RTOS
- Exemplul I: PALOS
- Implementarea proceselor PALOS
- Event Handlere in PALOS
- Exemplul II: uCOS-II
- Exemplul III: Real-time Linux
- Alegerea unui RTOS
- Concluzii