

Modul de functionare
Pentru ca receptorul GPS sa functioneze corect, trebuie sa indeplineasca doua conditii. Prima este aceea de localizare a satelitilor pe orbita, iar cea de-a doua este distanta de la satelit la receptor. Dar in prima faza sa acordam importanta asupra modului cum receptorul memoreaza date despre localizarea satelitilor pe orbita.
Sa nu uitam ca receptorul primeste de la satelit doua tipuri de informatii codate. Primul tip de informatie se numeste ALMANAC, este o informatie despre modul in care sunt plasati satelitii pe orbite si pe ce orbite se gasesc acestia la un moment dat. ALMANAC este in mod continuu transmis de satelit si stocat de receptorul GPS in memorie.
Orice satelit poate avea la un moment dat mici abateri de la pozitiile normale de lucru, iar statiile de la sol ce fac parte din segmentul de control au sarcina de a corecta pozitia satelitului pe orbita, altitudinea si viteza de deplasare a acestuia. Aceste date corectate pe care satelitul le receptioneaza in forma codata de la statiile de la sol din segmentul de control poarta denumirea de EPHEMERIS. Acesta raman valide doar un interval de timp intre 4 si 6 ore, dupa care este improspatat.
Localizarea satelitilor
O data ce receptorul GPS a receptionat de la satelit ALMANAC-ul, iar statiile de la sol au trimis EPHEMERIS-ul, acesta cunoaste localizarea satelitilor in orice interval de timp. Desi receptorul cunoaste pozitia satelitilor pe orbita, totusi nu se poate determina pozitia utilizatorului pe receptorul GPS pe suprafata pamantului. O formula simpla ce ii genereaza receptorului informatii despre distanta receptor-satelit ar fi: D = V x T, unde:
D – distanta de la satelit la receptor;
V – viteza de propagare a semnalului de la satelit la receptor;
T – timpul de propagare a semnalului.
Aflarea vitezei de propagare a undelor nu reprezinta o problema, deoarece aceasta se aproximeaza cu 300.000 km/secunda (viteza luminii). Timpul de propagare al semnalului de la satelit la receptor se determina din insusi semnalul receptionat de receptor. Codul transmis de satelit este un cod pseudoaleator.
Cand un satelit genereaza si transmite acest cod aleator, receptorul genereaza si el acelasi cod si incearca sa il potriveasca cu cel primit de la satelit. Urmand ca receptorul sa compare cele doua coduri pentru a determina intarzierea intre acestea. Acest timp de intarziere inmultit cu viteza de propagare a luminii permite aflarea distantei de la satelit la receptor.
Ceasul intern al receptorului GPS
Ceasul intern al receptorului GPS nu are aceeasi precizie ca cea a ceasului atomic al satelitului. Neputand fi dotat fiecare receptor GPS in parte cu cate un ceas atomic datorita costurilor ridicate, trebuie facuta o corectie a distantelor calculate de receptor.
Pentru a se putea realiza acest calcul, se aleg un numar de 4 sateliti de la care se determina distanta pana la receptor. Trei din cele 4 masuratori fiind de baza, iar a patra efectuandu-se pana ce sunt inlaturate erorile temporale.
Dupa ce au fost determinate cele doua elemente esentiale, localizarea si distanta, receptorul poate determina pozitia utilizatorului in urma calculelor interne pe care le efectueaza in memorie intr-un interval de timp foarte scurt. In acelasi timp se va face si transmiterea acestor calcule catre calculator, unde prin intermediul interfatei grafice vor fi afisate rezultatele.
Determinarea pozitiei exacte a utilizatorului (receptorului GPS)

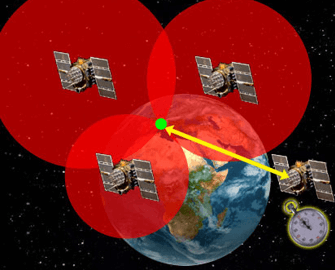
De ce este nevoie de al 4-lea satelit pentru determinarea pozitiei exacte?

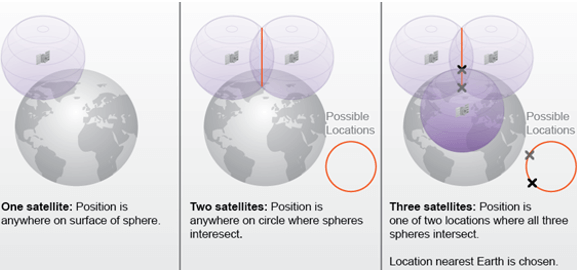
Pentru o mai buna intelegere a celor prezentate sa presupunem ca ne aflam la o distanta de 17.600 km de un prim satelit, localizarea noastra ar trebui sa fie undeva pe o sfera imaginara ce are satelitul in centrul acestei sfere cu raza de 17.600 km. In continuare, vom avea in vedere ca fata de al doilea satelit ne aflam la 19.200 km distanta. Cea de-a doua sfera ar trebui sa o intersecteze pe prima astfel incat punctele comune de intersectie sa fie plasate pe un cerc.
Daca avem in vedere si un al treilea satelit ce ar fi la 20.800 km distanta de noi, vor fi puncte de intersectie intre cele trei sfere formate doar din doua puncte. Desi avem 2 puncte, acestea difera pe latitudine, longitudine si altitudine.
Pentru a determina care dintre cele doua puncte este cel corect, utilizatorul ar trebui sa introduca in calculele efectuate de GPS si altitudinea. Pentru a reduce din erori este luat in calcul si al patrulea satelit, pentru a putea determina cu exactitate punctul de intersectie.
Sincronizarea semnalelor GPS de receptie si transmisie

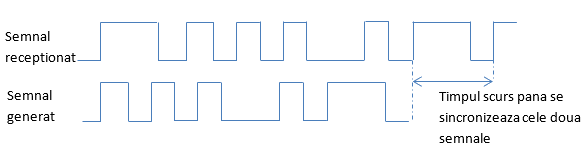
Receptorul GPS inmagazineaza informatii despre pozitionarea satelitilor in orice interval de timp in asa numitul ALMANAC, daca receptorul este inchis pentru o perioada de timp, pierde ALMANAC. Daca exista o astfel de situatie, la repornirea receptorului acesta are nevoie de o perioada mai mare pentru refacerea ALMANAC-ului. Starea de pierdere a ALMANAC-ului poarta numele de „COLD”, iar momentele cand receptorul nu a avut stare de pierdere, nu a fost inchis poarta numele de „WARM”.
O data ce receptorul a colectionat semnale de la cel putin 4 sateliti, are posibilitatea de a calcula si furniza date despre pozitia de la sol. Cele mai multe receptoare moderne GPS, sunt dotate cu un sistem de receptionare multicanal, intre 5 si 12 canale, fiecare colectand semnal de la un singur satelit in parte. Acest sistem multicanal permite o viteza mai mare de lucru, iar in cazul in care se pierde semnalul de la un satelit din diferite cauze, se face automat comutarea pe un alt canal si foloseste datele receptionate de pe noul canal pentru o realizare corecta a calculelor.
Receptoarele GPS civile sunt predispuse la erori, iar cauzele principale de aparitie ar putea fi:
- intarzierea datorata ionosferei si troposferei. Semnalele de la satelit sunt incetinite datorita trecerii prin atmosfera. Sistemul foloseste pentru a inlatura erorile, un model matematic de corectie in functie de medii prin care trece semnalul;
- reflexiile datorate cladirilor inalte sau formelor diferite de relief;
- erori datorate distantelor de ceas, cel de pe satelit fata de cel de pe receptor;
- erorile orbitale datorate raportarii incorecte a pozitiei satelitului – numarul de sateliti vizibili de catre antenna receptorului GPS. Este recomandat ca plasarea antenei sa se faca intr-o zona cu deschidere cat mai larga spre cer pentru o mai buna receptionare a semnalului;
- degradare intentionata a semnalului receptionat de la satelit, acest drept fiind rezervat de Ministerul de Aparare al SUA, avand ca scop de a induce in eroare un eventual inamic;
- erori datorate densitatii ionosferei, ce nu este constanta, aceasta densitate depinzand de numarul de eruptiile solare si de radiatiile solare;
- erori datorate elevatiei satelitului (elevatie – inaltimea satelitului desupra geoidului de rotatie). In functie de aceasta elevatie, distanta parcursa de semnal de la satelit la receptorul GPS poate diferi in mare masura.
Micsorarea numarului de erori de calcul GPS
Pentru a micsora numarul de erori de calcul, receptorul GPS se poate cupla la un alt sistem cunoscut ca si DGPS (GPS – diferential) ce are posibilitatea de a reduce nivelul erorilor. Sistemul DGPS permite utilizatorului civil sa creasca precizia masuratorii de la cativa metri pana la 2-3 cm sau mai putin fiind mult mai util in aplicatiile civile.
In acest scop, o antenna de referinta este pozitionata intr-un punct de coordonate cunoscute, receptorul montat fiind cunoscut ca si receptor de referinta sau ca statie de baza. Atunci cand receptorul este pornit, acesta incepe sa calculeze distanta de la el pana la satelit (in conditiile unui receptor obisnuit). Deoarece acest receptor este amplasat intr-un punct de coordonate cunoscute, poate calcula cu o mai buna precizie erorile de pozitie ce pot aparea. Ulterior face diferenta intre valorile pe care le-a masurat si valorile calculate ce le are introduse in memorie, rezultatul fiind interpretat ca o posibila corectie.
De cele mai multe ori receptorul de referinta este conectat la o statie de emisie ce are rolul de a transmite aceste corectii. La receptoarele obisnuite ce doresc sa utilizeze sistemul DGPS, acestea se conecteaza la un Rover Receiver, ce are ca rol primirea corectiilor de la receptorul referinta. Rover receiver-ul calculeaza in mod obisnuit distantele pana la satelit, iar mai apoi aplica datele corectoare primite de la statia de baza. De precizat ca Rover receiver-ul poate primi date corectoare doar de la un singur receptor referinta.
Remotely Operated Video Enhanced Receiver (ROVER)


Aspecte generale privind modul de interpretare al calculelor facute de receptorul GPS
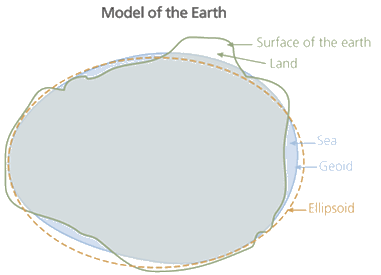
Cu toate ca suprafata Pamantului pare a fi o sfera uniforma vazuta din spatiu, suprafata difera. Pentru a fi redate corect coordonatele de pe suprafata Pamantului, GPS-ul utilizeaza un sistem de coordonate geodezice bazate pe un elipsoid. Un elipsoid poate fi interpretat ca o sfera ce are doi poli putin turtiti. Elipsoidul folosit de GPS poarta denumirea de WGS84 (World Geodetic System 1984). Un punct de pe suprafata Pamantului poate fi definit cu ajutorul celor trei coordinate latitudinea, longitudinea si inaltimea elipsoidului.
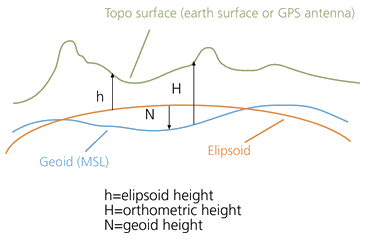
Ca alternative pentru definirea pozitiei unui punct a fost folosit sistemul cartezian de coordinate, distantele fiind notate cu X, Y si Z originea fiind in centrul sferei. Cand este utilizat un receptor GPS, coordonatele pozitiei calculate au la baza elipsoidul WGS84. Coordonatele existente sunt transformate intr-un sistem local. Principal problema este aceea de a determina inaltinea. Toate inaltimile masurate de GPS sunt strans legate de suprafata elipsoidului WGS84. Aceste inaltimi sunt cunoscute ca si inaltimi elipsoidale. Inaltimile existente sunt inaltimi ortometrice masurate de la nivelul marii, fiind cunoscut ca si geoid. Geoidul poate fi definit ca o suprafata echipotentiala la fel cum forta gravitationala este o constanta in orice punct al geoidului. Geoidul are forma neregulata ce nu corespunde elipsoidului.
Forma elipsoidului WGS84

Relatiile dintre elipsoid, geoid si suprafata pamantului difera destul de mult. Cele mai multe harti intrebuinteaza inaltimi ortometrice (relative la geoid) si cei mai multi utilizatori de GPS cer ca inaltimile sa fie ortometrice. Aceasta problema este rezolvata folosind modele geodezice pentru a transforma inaltimile elipsoidale in inaltimi ortometrice. Pe suprafete relative plane geoidul poate fi considerat ca este un plan. In calculele folosite de GPS sunt realizate o serie de transformari pentru a trece dintr-un sistem in altul si pentru a obtine o serie de parametri necesari calculelor.

Calcul GPS pentru aflarea inaltimii

Transformarile Hermert
Atunci cand se realizeaza o transformare trebuie sa acordam o atentie deosebita schimbarii pozitiei originii si nu asupra suprafetei pe care aceasta se intinde. Pentru a transforma o coordonata dintr-un sistem in altul, trebuie cunoscuta interdependenta dintre origine si axe. Din aceste informatii trecerea in spatiu XYZ de la o origine la alta poate fi determinata dupa orice rotatie in jurul celor 3 axe si orice schimbare de scala intre cei doi elipsoizi.
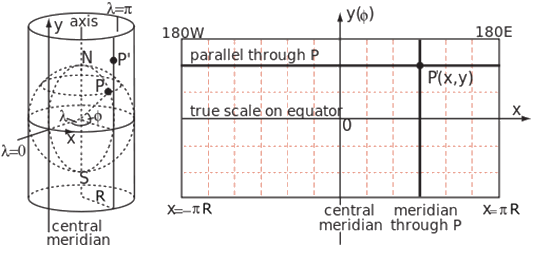
Mai este utilizata de asemenea si aproximarea prin interpolare ceea ce permite alcatuirea unui model matematic de calcul pentru inaltime. In principal sunt folosite proiectiile Mercator, acestea se bazeaza pe un cilindru care e putin mai mic decat sferoidul. Aceasta metoda se aplica in principiu pentru tarile mari si aflate in jurul ecuatorului.
Proiectiile Mercator sunt definite de:
- un punct cardinal Estic si Nordic fals;
- latitudinea originii;
- meridianul central;
- scara de pe meridianul central;
- latimea zonei.
Nordul si estul, puncte artificiale, sunt definite astfel incat originea proiectiei unei anumite zone sa cada in partea din stanga-jos a sistemului de coordinate. Latitudinea originii defineste latitudinea axelor cilindrului, de fapt ecuatorul.
Exemplu de proiectie Mercator

Transformarile Lambert
Acestea se bazeaza pe proiectiile rezultate in urma intersectiei dintre un con cu o sfera. Acest model matematic rezultat este folosit pentru tarile ce au o forma a suprafetei terestre ce poate fi asemanata cu un cerc, de exemplu insulele si in special regiunile polare. Proiectiile Lambert sunt definite de:
- Estul si Nordul artificial;
- latitudinea originii;
- centrul meridianului;
- latitudinea primei paralele;
- latitudinea celei de-a doua paralele.
Exemplu de proiectie Lambert

Termeni utilizati in limbajul GPS
1. Almanac – biblioteca ce contine datele necesare calcularii pozitiei satelitului pe orbita (azimut, inaltime, timp, elevatie)
2. Azimut – unghi orizontal pe o directie (exemplu: nord) masurat in sensul acelor de ceasornic.
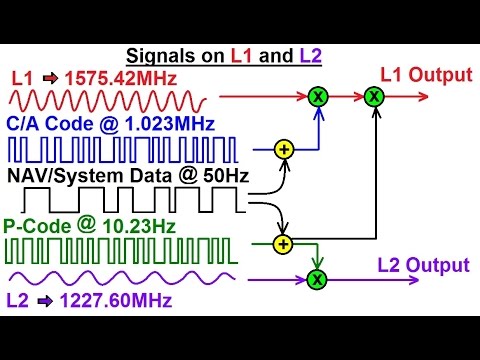
3. Codul C/A – cod modulat pe purtatoarea L1. Acest cod reprezinta o secventa pseudoaleatoare de 1023 biti cu o modulatie bifazica pe purtatoarea de la satelit si care se repeat dupa fiecare milisecunda.
4. Elevatie – inaltimea deasupra geoidului.
5. Ephemeris – localizare functie de timp a unui obiect ceresc (satelitul).
6. Latitudine – unghi format de normal elipsoidului si planul ecuatorial. Latitudinea este 0 la ecuator si 90 de grade la poli.
7. Banda L – domeniul de frecventa cuprins intre 390 MHz si 1550 MHz, in acest domeniu fiind dispuse cele doua frecvente L1 si L2.
8. Longitudine – unghi facut de elipsa meridian ce trece prin Greenwich (meridianul zero) si elipsa meridian pe care se afla punctul studiat.
9. Meridian – o linie imaginara ce traverseaza globul pamantesc de la nord la sud, fiind perpendiculara pe ecuator.
10. Codul P – secventa pseudoaleatoare binara foarte lunga ce se repeta dupa aproximativ 267 de zile.
Bibliografie / surse:
Articol preluat din Revista Conex Club nr. 7-8 din anul 2002.
https://www.esri.com/
https://en.wikipedia.org/ROVER
https://en.wikipedia.org/Mercator
https://en.wikipedia.org/Lambert