Autor: Ioan D. Doroftei
An aparitie: 2006
Facultatea de Mecanica – Iasi
Ce prezinta lucrarea?
Scopul acestei lucrari este de a prezenta studentilor componentele de baza ale unui robot, precum si de a efectua analiza structurala a sistemului mecanic, folosind robotii din dotarea unui laborator.
Componentele de baza ale unui sistem robotizat
Componentele de baza ale unui sistem robotizat pot fi grupate in patru sisteme distincte, fiecare avand importanta sa si meritand atentia cuvenita. Aceste sisteme sunt:
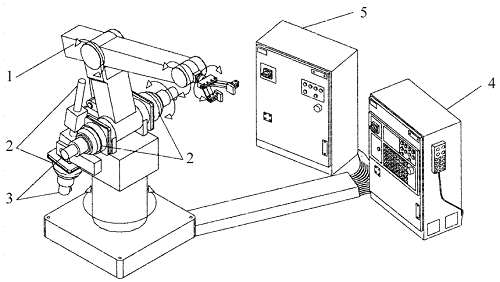
1. Sistemul mecanic
Notat cu 1, ce contine lanturi cinematice (inchise sau deschise) – in cazul unui robot de tip manipulator – sau un corp si roti (picioare) – in cazul unui robot mobil (pasitor).
In cazul robotilor cu structura mixta, acest sistem contine un lant cinematic (inchis sau deschis) montat pe o platforma mobila.
Elementele lanturilor cinematice sunt conectate prin cuple, care determina gradul de mobilitate al robotului. Cuplele cinematice sunt, de regula, de rotatie sau translatie.
2. Sistemul de actionare
Format din: sursa de energie si amplificator, notate cu 5; motoare si transmisii mecanice, notate cu 2 – contribuie la punerea in miscare a robotului.
In mod curent, se utilizeaza actuatori electrici, hidraulici sau pneumatici, dar pot fi utilizati si actuatori neconventionali (materiale cu memoria formei, fluide electro-reologice, motoare piezoelectrice polimeri electroactivi, etc).
Transmisiile mecanice fac legatura dintre actuator (motor) si elementele cinematice conducatoare ale sistemului mecanic.
Aceste transmisii sunt, in general, utilizate din trei motive: cel mai adesea deoarece caracteristicile actuatorului (turatie, cuplu, etc.) nu sunt corespunzatoare pentru actionarea directa a robotului; al doilea motiv ar fi acela ca tipul miscarii la iesirea din actuator nu corespunde tipului cuplei cinematice conducatoare (pentru transformarea miscarii de rotatie in miscare de translatie sau invers); al treilea motiv este acela ca actuatorii au adesea o masa mare si nu este practica localizarea lor in imediata vecinatate a cuplei cinematice.
3. Sistemul senzorial
In cazul de fata, traductoarele de pozitie si de viteza, 3 – masoara pozitia si sensul de deplasare pentru elementele cinematice (robotul in ansamblu).
Se pot utiliza: traductoare de pozitie si de forta in cuplele cinematice, senzori tactili pe degetele de apucare, camere video pe o platforma mobila, etc.
4. Sistemul de comanda
Sistemul de comanda (control), 4, citeste informatiile de la senzori si transmite semnale de control catre actuatori, pentru realizarea obiectivelor specificate in program.
Structura cursului
LUCRAREA 1 – ARHITECTURA UNUI ROBOT SI ANALIZA STRUCTURALA A SISTEMULUI MECANIC
1.1 Scopul lucrarii
1.2 Arhitectura unui robot de tip manipulator
1.3 Analiza structurala a sistemului mecanic
1.3.1 Definitii
1.3.2 Structura sistemului mecanic
1.3.3 Mobilitatea sistemului mecanic
1.3.4 Exemplu de calcul
1.4 Modul de lucru
LUCRAREA 2 – TRANSORMARI DE COORDONATE
2.1 Scopul lucrarii
Scopul acestei lucrari este de a deprinde studentii cu modul de efectuare a calculelor necesare determinarii pozitiei si orientarii unui corp in spatiul tridimensional, in raport cu un sistem de axe de referinta.
2.2 Baze teoretice
2.2.1 Sisteme de coordonate
2.2.2 Pozitia si orientarea unui corp rigid
2.2.3 Matricea de rotatie
2.2.3.1 Rotatii elementare (simple)
2.2.3.2 Compunerea matricelor de rotatie
2.2.4 Matricea omogena de transformare
2.2.4.1 Forme particulare pentru matricea de transformare omogena
2.3 Exemplu
2.3.1 Introducere in MATLAB
2.3.2 Exemplu de calcul
2.3.3 Program de calcul in MATLAB
2.4 Modul de lucru
LUCRAREA 3 – ANALIZA CINEMATICA DIRECTA A POZITIILOR UNUI ROBOT SPATIAL DE TIP MANIPULATOR
3.1 Scopul lucrarii
Scopul acestei lucrari este de a efectua analiza cinematica directa a pozitiilor pentru un robot spatial de tip manipulator, folosind parametrii Denavit-Hartenberg (D-H) standard. Astfel, vor fi determinati parametrii D-H ai manipulatorului si se va efectua doar un calcul simbolic, cu scopul de a deprinde studentii cu determinarea parametrilor respectivi si cu pasii ce trebuie urmati, in vederea efectuarii analizei cinematice directe a pozitiilor.
3.2 Baze teoretice
3.2.1 Generalitati
3.2.2 Definirea parametrilor Denavit-Hartenberg standard
3.3 Exemplu de calcul
3.4 Modul de lucru
LUCRAREA 4 – SIMULAREA PE CALCULATOR A CINEMATICII DIRECTE A POZITIILOR
4.1 Scopul lucrarii
Scopul acestei lucrari este de a efectua, cu ajutorul calculatorului, analiza cinematica directa a pozitiilor pentru un robot spatial de tip manipulator, folosind parametrii Denavit-Hartenberg (DH) standard. Utilizand parametrii D-H ai manipulatorului, determinati in cadrul lucrarii practice precedente, se va efectua calculul simbolic, respectiv un exemplu de calcul numeric al matricei omogene a acestuia.
4.2 Generalitati
4.3 Program de calcul
4.4 Modul de lucru
LUCRAREA 5 – ANALIZA CINEMATICA INVERSA A POZITIILOR PENTRU ROBOTII SPATIALI DE TIP MANIPULATOR
5.1 Scopul lucrarii
Scopul acestei lucrari este acela de a efectua analiza cinematica inversa a pozitiilor pentru un robot spatial de tip manipulator din dotarea laboratorului, in vederea controlului miscarii acestuia in cadrul unor lucrari practice ulterioare.
5.2 Baze teoretice
5.2.1 Generalitati
5.2.2 Consideratii matematice preliminare
5.3 Exemplu
5.4 Modul de lucru
LUCRAREA 6 – COMANDA IN POZITIE A EFECTORULUI FINAL PE BAZA REZULTATELOR CINEMATICII DIRECTE
6.1 Scopul lucrarii
Scopul acestei lucrari este de a comanda deplasarea efectorului final intr-o anumita pozitie, plecand de la o pozitie initiala a acestuia, pe baza rezultatelor obtinute la analiza cinematica inversa a pozitiilor, analiza efectuata folosind parametrii Denavit-Hartenberg (D-H) standard.
6.2 Generalitati
6.3 Modul de lucru
LUCRAREA 7 – CALCULUL MATRICEI JACOBIENE GEOMETRICE A UNUI ROBOT DE TIP MANIPULATOR
7.1 Scopul lucrarii
Scopul acestei lucrari este de a determina matricea Jacobiana geometrica pentru un robot de tip manipulator cu structura seriala.
7.2 Baze teoretice
7.2.1 Generalitati
7.2.2 Matricea Jacobiana geometrica
7.2.2.1 Notiuni introductive
7.2.2.2 Calculul matricei Jacobiene geometrice
7.2.2.3 Schimbarea sistemului de referinta al matricei Jacobiene
7.3 Exemplu de calcul
7.4 Modul de lucru
LUCRAREA 8 – COMANDA UNUI SERVOMECANISM DE CURENT CONTINUU, CU MICROCONTROLER PIC16F84
8.1 Scopul lucrarii
Scopul acestei lucrari este de a prezenta studentilor componentele de baza ale unui servomecanism, structura generala a unui microcontroler PIC 16F84, precum si utilizarea acestuia pentru comanda pozitiei unui servomecanism de curent continuu.
8.2 Servomecanism de curent continuu
8.2.1 Prezentare generala
8.2.2 Principiul de control al pozitiei unui servomecanism
8.3 Platforma de dezvoltare cu microcontroler PIC16F84
8.3.1 Generalitati
8.3.2 Microcontrolerul PIC16F84
8.3.3 Schema electronica de comanda
8.3.4 Exemplu de program, pentru compilator C2C
8.4 Modul de lucru
LUCRAREA 9 – COMANDA UNUI MECANISM CU DOUA GRADE DE MOBILITATE (PICIOR DE ROBOT PASITOR) CU MICROCONTROLER PIC16F84
9.1 Scopul lucrarii
Scopul acestei lucrari este de a comanda si controla mecanismul unui picior de robot pasitor, actionat cu doua servomecanisme MPX Tiny-S, utilizand un microcontroler PIC 16F84.
9.2 Servomotor MPX Tiny-S
9.2.1 Date tehnice
9.2.2 Principiu de efectuare a controlului
9.3 Mecanismul piciorului
9.4 Platforma de dezvoltare cu microcontroler PIC16F84
9.4.1 Schema electronica de comanda
9.4.2 Exemplu de program, pentru compilator C2C
9.5 Modul de lucru
LUCRAREA 10 – CONTROLUL MISCARII ROBOTULUI OMNIDIRECTIONAL CU ROTI UNIVERSALE – ROBOTINO
10.1 Roata universala
10.2 Elemente constructive ale robotului
10.3 Cinematica robotului
10.3.1 Cinematica directa
10.3.2 Cinematica inversa
10.3.3 Alte elemente de calcul
10.4 Modul de lucru
Surse:
Primele automate au aparut in China acum mii de ani in urma.